带你了解人工智能机器人系统
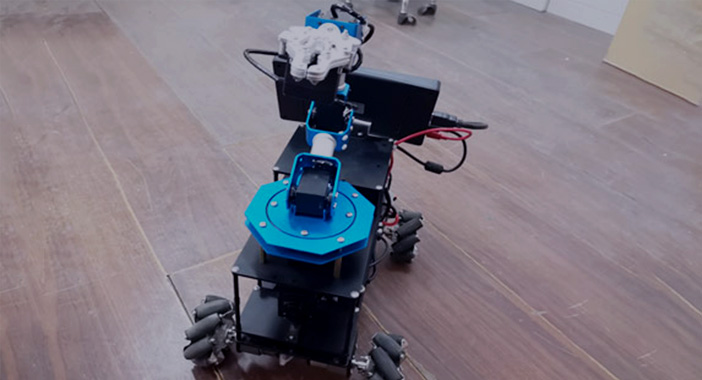
深入了解人工智能机器人系统
项目可实现的功能
 目标检测
目标检测- 人脸识别
- 微表情识别
- 车牌识别
- 数字识别
- 语音识别

可以学习到的技术点
- 平衡车控制技术(机器人FS_AIROBOTA)
- ROS机器人操作系统技术(机器人FS_AIROBOTB)
- STM32开发技术
- 嵌入式Linux技术
- TensorFlow机器学习技术
- AI语音识别技术
- 机械臂控制技术(机器人FS_AIROBOTB)
22天项目实训全过程拆解
项目开发管理
的内容介绍小项目答辩分
享会项目开发前预
热小项目开发大项目开发计
划安排项目答辩
大项目开发
更多精彩课程视频